|
|
|
|

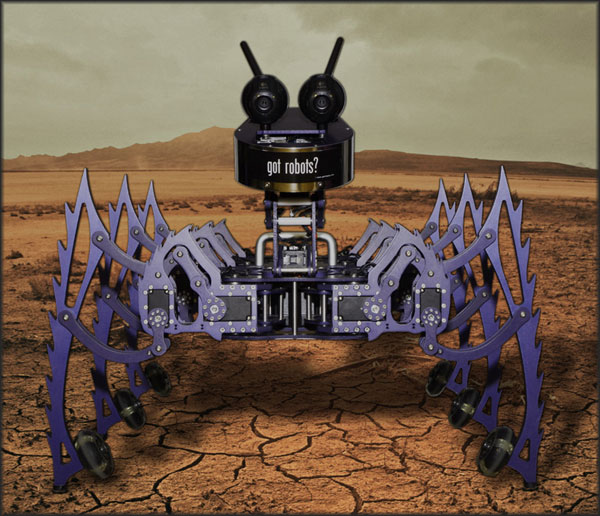
The Glider Robot Platform represents the culmination of over a decade of research and develepment into increasing the energy efficiency and capability of a walking robot. It is an iterative evolution of a novel leg linkage design that utilizes an inline geometry when the leg is placed on the ground, resulting in a net zero force on the main elbow joint motors supporting the mass of the robot. This allows the robot to use smaller, lighter motors and results in an unusually efficient robot - it takes no energy to stand still, and when walking on an even surface, the motors do not need to support the robot
This revolutionary platform is now available to researchers and educators who are interested in working with walking robots. The Python based SDK contains a variety of different gaits and behaviours, with room for many more. In addition, stereo cameras provide for stereoscopic machine vision, with full WIFI and Bluetooth connectivity for off-robot processing. The robot runs locally on a dual core Intel Atom running Linux, providing plenty of MIPS for self contained, autonomous algorithms. Please contact us if you are interested in learning more about the Glider Robot Platform. |
|
 The robot has 3 DOF (Degrees Of Freedom) per leg, which gives it not only the
ability to lift its legs a full 200mm (8") but also, when the legs are splayed out
on a flat surface (such as a paved road), its passive wheels engage and it is capable
of skating with a swimming motion at up to 10kph (6mph).
This dual capability provides offroad prowess over extremely rough terrain coupled
with the ability to move at speed when a level surface such as a paved road is
encountered. Both the skating and walking gaits control the robot under a full
Inverse Kinematics (IK) subsystem, resulting in very smooth and organic looking
motions.
The robot has 3 DOF (Degrees Of Freedom) per leg, which gives it not only the
ability to lift its legs a full 200mm (8") but also, when the legs are splayed out
on a flat surface (such as a paved road), its passive wheels engage and it is capable
of skating with a swimming motion at up to 10kph (6mph).
This dual capability provides offroad prowess over extremely rough terrain coupled
with the ability to move at speed when a level surface such as a paved road is
encountered. Both the skating and walking gaits control the robot under a full
Inverse Kinematics (IK) subsystem, resulting in very smooth and organic looking
motions.